4.2
4.2.1 Pag 104/2 (4.1) Pag 105/3 (Fig4.1)
4.2.2 Pag 107/4 (4.2) (4.3)
4.2.3 Pag 108/5 (4.4) (4.5)(4.6)
4.3 Pag 110/8 (4.7) (4.8) Pag 111/9 (4.9) (4.10) Pag 112/10 (4.11) (4.12) Pag 113(4.13) (4.14)








s=%s;





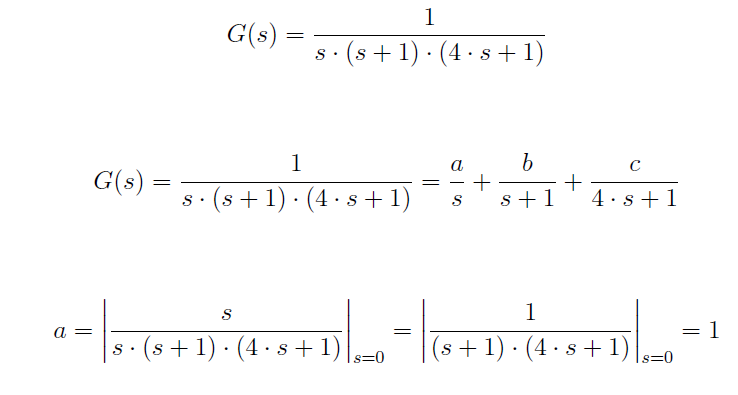
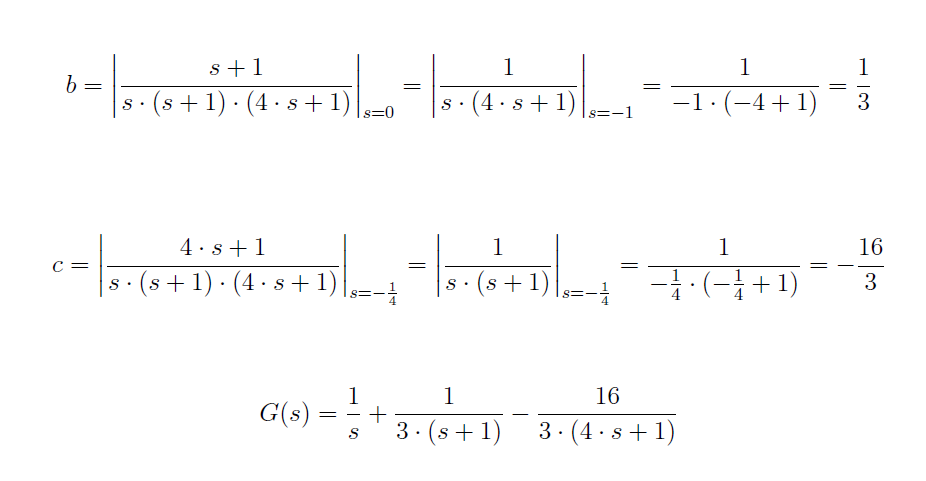
s=%s; g=1/(s*(s+1)*(4*s+1)); gs=syslin('c',g); dfs=pfss(gs)






 |
| Respuesta a un escalon de un sistema segundo grado, cuando el factor de amortiguamiento es uno esta criticamente amortiguado y cuando es menor que uno subamortiguado |










